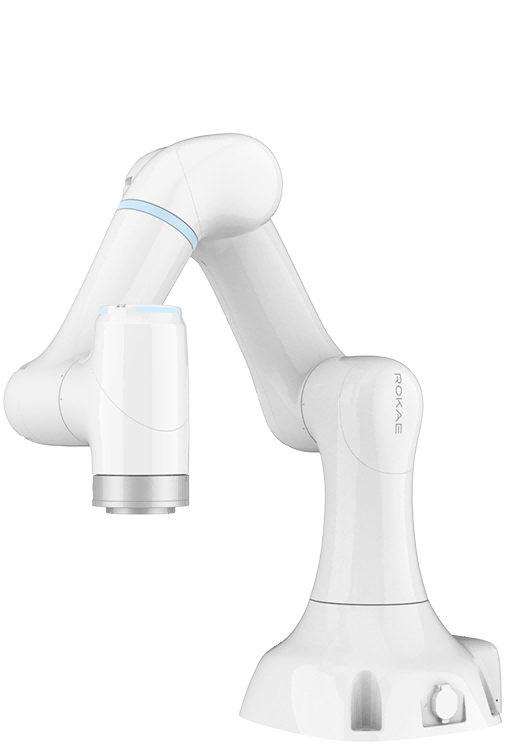
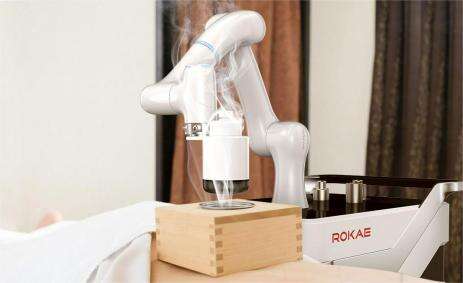
SR系列柔性协作机器人

xMate SR是ky体育新一代柔性协作机器人,外观轻盈灵动,低成本高性价比,平均半年到一年可收回投资成本。
○ 机器人采用工业级高性能核心零部件,保证24小时稳定可靠作业。
○ 所有关节均配置力矩传感器,实现一指触停般的灵敏碰撞检测能力,加之独立安全控制以及≥21项TÜV功能安全认证多重防护,将人机安全协作发挥到极致。
○ 1N超轻拖动示教,单手拖动即可轻松调整点位,配合图形化编程、丰富的二次开发接口以及无控制柜设计,极大降低机器人使用门槛。
○ 机器人采用工业级高性能核心零部件,保证24小时稳定可靠作业。
○ 所有关节均配置力矩传感器,实现一指触停般的灵敏碰撞检测能力,加之独立安全控制以及≥21项TÜV功能安全认证多重防护,将人机安全协作发挥到极致。
○ 1N超轻拖动示教,单手拖动即可轻松调整点位,配合图形化编程、丰富的二次开发接口以及无控制柜设计,极大降低机器人使用门槛。
SR系列
申请样机